
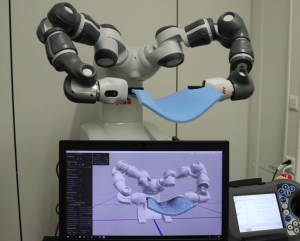
Manipulation of non-rigid e-commerce parcels
Status
This project started in 2019 and has been successfully completed in 2022.
Researchers
Prof. Stelian Coros (ETH)
Miguel Mora (ETH)
Oliver Stark (ETH)
Industry partner
Die Post
Description
Problem statement: The Swiss Post knows how to process form-stable items (Letters or packages).
For these types of items, we have appropriate technologies. With the growing volume of e-commerce
items from Asia, however, we have the challenge that the range (material, size, unstable structure,
surface pressure, different shapes …) of these items vary massively. For this spectrum, we do not yet
have suitable technologies in the postal industry. Therefore, the decision for the subsequent process
is made by a manual (feel with the hand) and visual judgment by the employee. They touch, turn, look,
bend the item.
Basic research: Solving the problem stated above requires robots that can dexterously
manipulate soft, unstructured parcels and polybags. To this end, we will build on the model-based
methodology my research group has recently introduced. In particular, the goal of this thesis will be to
develop technical foundations to allow the robot 1) to build an internal mechanical model of
soft/unstructured parcels by feeling/scanning/manipulating the items, and 2), to autonomously
understand how to grasp, pick up, and dynamically place the soft parcel on a conveyer belt in a
prescribed configuration.
Technical foundations that the CRL group will contribute to:
1. Physics-based simulation models that will let robots understand and predict the physical
implication of their actions.
2. A differentiable simulator as the technical foundation for trajectory optimization algorithms that
will generate dynamic motion plans.
3. Robotic teleoperation as the means to learn complex motion skills from demonstrations.